2 数字图像基础
简单成像模型
\[ f(x,y)=i(x,y)r(x,y) \]
其中\(i(x,y)\)为入射到被观察场景的光源照射量, \(r(x,y)\)表示被场景中反射的照射量
\[ 0\le i(x,y)\le \infty \]
\[ 0\le r(x,y)\le1 \]
灰度级数: 表示一个灰度的2的次方数, 比如256, 128等
内插: 把图像放大后中间的像素填充, 邻近内插, 双线性内插, 双三次内插
邻接:
4邻接, 上下左右
8邻接, 上下左右+四对角
m邻接, 优先用4邻接联通, 比如
1 - 1 1 - 1
/ => |1 1
距离:
- \(D_4\) 上下左右为1, 斜角为2
- \(D_8\) 上下左右斜角都为1
仿射变换:
包括缩放,平移,旋转,剪切
变换矩阵:
\[ \large \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \pmb{A} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \begin{bmatrix} a_{11} & a_{12} & a_{13}\\ a_{21} & a_{22} & a_{23}\\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} \]
恒等: 矩阵为单位阵
\[ \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \]
缩放:
\[ \begin{bmatrix} c_x & 0 & 0 \\ 0 & c_y & 0 \\ 0 & 0 & 1 \end{bmatrix} \]
\[ \begin{gather} x'=c_xx \\ y'=c_yy \end{gather} \]
平移:
\[ \begin{bmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{bmatrix} \]
\[ \begin{gather} x'=x+t_x\\ y'=y+t_y \end{gather} \]
垂直剪切:
\[ \begin{bmatrix} 1 & s_v & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \]
\[ \begin{gather} x'=x+s_vy\\ y'=y \end{gather} \]
水平剪切:
\[ \begin{bmatrix} 1 & 0 & 0 \\ s_h & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} \]
\[ \begin{gather} x'=x\\ y'=y+s_hx \end{gather} \]
3 灰度变换与空间滤波
对数变换:
\[ s=c\log(1+r) \]
大部分傅里叶频谱都是这样变换后方便观察
伽马变换:
\[ s=cr^\gamma \]
显示器校正
比特平面分层
直方图均衡: 使得直方图的分布是均匀密度的
直方图匹配(规定化): 使得直方图的分布按照预设的分布分布
相关:
\[ (w☆f)(x,y)=\sum_{s=-a}^{a}\sum_{t=-b}^{b}w(s,t)f(x+s,y+t) \]
卷积:
\[ (w★f)(x,y)=\sum_{s=-a}^{a}\sum_{t=-b}^{b}w(s,t)f(x-s,y-t) \]
| 性质 | 卷积 | 相关 |
|---|---|---|
| 交换律 | \(g★f=f★g\) | - |
| 结合律 | \(f★(g★h)=(f★g)★h\) | - |
| 分配律 | \(f★(g+h)=f★g+f★h\) | \(f☆(g+h)=f☆g+f☆h\) |
空间滤波核:
高斯函数:
\[ G(s,t)=Ke^{-\frac{s^2+t^2}{2\sigma}} \]
积分:
\[ \int_{-\infty}^{\infty}e^{-ax^2}=\sqrt{\frac{\pi}{a}} \]
拉普拉斯:
\[ \nabla^2f=\frac{\partial^2f}{\partial x^2}+\frac{\partial^2f}{\partial y^2} \]
sobel算子:
\[ \begin{matrix} -1&-2&-1\\ 0&0&0\\ 1&2&1 \end{matrix} \qquad \begin{matrix} -1&0&1\\ -2&0&2\\ -1&0&1 \end{matrix} \]
算边缘时两幅图的边缘绝对值相加
4 频率域滤波
欧拉公式:
\[ e^{j\theta}=\cos(\theta)+j\sin(\theta) \]
推导: 把\(e^\theta\)用泰勒公式展开, 然后带入\(j\)
傅里叶变换:
\[ \Im{\{f(t)\}}=\int^{\infty}_{-\infty}f(t)e^{-j2\pi\mu t}\text{d}t \]
反变换:
\[ f(t)=\int^{\infty}_{-\infty}F(\mu)e^{j2\pi\mu t}\text{d}\mu \]
卷积定理:
\[ \begin{gather} (f★h)(t)\Leftrightarrow(H\cdot F)(\mu)\\ (f\cdot h)(t)\Leftrightarrow(H★F)(\mu) \end{gather} \]
离散傅里叶变换:
\[ \large \begin{gather} F(u)=\sum^{M-1}_{x=0}f(x)e^{-j2\pi ux/M}\\ f(x)=\frac{1}{M}\sum^{M-1}_{u=0}F(u)e^{j2\pi ux/M} \end{gather} \]
二维离散傅里叶变换:
\[ \large \begin{gather} F(u,v)=\sum^{M-1}_{x=0}\sum^{N-1}_{y=0}f(x,y)e^{-j2\pi(ux/M+vy/N)}\\ f(x,y)=\frac{1}{MN}\sum^{M-1}_{u=0}\sum^{N-1}_{v=0}F(u,v)e^{j2\pi(ux/M+vy/N)} \end{gather} \]
平移和旋转:
\[ \large \begin{gather} f(x,y)e^{j2\pi(u_0x/M+v_0x/N)}\Leftrightarrow F(u-u_0,v-v_0)\\ f(x-x_0,y-y_0)\Leftrightarrow F(u,v)e^{-j2\pi(u_0x/M+v_0x/N)} \end{gather} \]
使用极坐标
\[ x=r\cos(\theta),y=r\sin(\theta),u=\omega\cos(\varphi),v=\omega\sin(\varphi) \]
得到:
\[ f(r,\theta+\theta_0)=F(\omega,\varphi+\theta_0) \]
频谱和原图是同方向角度旋转
二维卷积定理:
\[ (f\cdot h)(x,y)\Leftrightarrow \frac{1}{MN}(F★H)(u,v) \]
频域滤波公式:
\[ g(x,y)=\text{Real}\left\{\Im^{-1}[H(u,v)F(u,v)] \right\} \]
要使得频谱中心对称, 原数据得乘以\((-1)^{x+y}\)
理想低通滤波器:
存在振铃效应
高斯低通:
\[ \large H(u,v)=e^{-D^2(u,v)/2\sigma^2} \]
没有振铃效应
巴特沃斯低通:
\[ \begin{gather} H(u,v)=\frac{1}{1+\left [D(u,v)/D_0\right]^{2n}}\\ \qquad D(u,v)=\left[(u-P/2)^2+(v-Q/2)^2\right] \end{gather} \]
高通:
\[ H_{\text{HP}}(u,v)=1-H_{\text{LP}}(u,v) \]
高频强调滤波:
\[ g(x,y)=\Im^{-1}\left\{\left[k_1+k_2H_{\text{HP}}(u,v)\right]F(u,v)\right\} \]
同态滤波:
根据照射-反射模型
\[ \begin{gather} f(x,y)=i(x,y)r(x,y)\\ z(x,y)=\ln f(x,y)=\ln i(x,y)+\ln r(x,y) \end{gather} \]
傅里叶变换后频域滤波再反变换
5 图像复原与重建
退化模型:
\[ \begin{gather} g(x,y)=(h\bigstar f)(x,y)+\eta (x,y) \\ G(u,v)=H(u,v)F(u,v)+N(u,v) \end{gather} \]
空间滤波:
算术平均:
\[ \large \hat{f}(x,y)=\frac{1}{mn}\sum_{(r,c)\in S_{xy}}g(r,c) \]
几何平均:
\[ \large \hat{f}(x,y)=\left[\prod_{(r,c)\in S_{xy}}g(r,c)\right]^{\frac{1}{mn}} \]
谐波平均:
\[ \large \hat{f}(x,y)=\frac{mn}{\sum_{(r,c)\in S_{xy}}\frac{1}{g(r,c)}} \]
反谐波平均:
\[ \large \hat{f}(x,y)=\frac{\sum_{(r,c)\in S_{xy}}g(r,c)^{Q+1}}{\sum_{(r,c)\in S_{xy}}g(r,c)^Q} \]
中值滤波:
\[ \large \hat{f}(x,y)=\sideset{}{}{\text{median}}_{(r,c)\in S_{xy}}\{g(r,c)\} \]
最大值:
\[ \large \hat{f}(x,y)=\sideset{}{}{\text{max}}_{(r,c)\in S_{xy}}\{g(r,c)\} \]
最小值:
\[ \large \hat{f}(x,y)=\sideset{}{}{\text{min}}_{(r,c)\in S_{xy}}\{g(r,c)\} \]
中点:
\[ \large \hat{f}(x,y)=\frac{1}{2}\left[\sideset{}{}{\text{max}}_{(r,c)\in S_{xy}}\{g(r,c)\}+\sideset{}{}{\text{min}}_{(r,c)\in S_{xy}}\{g(r,c)\}\right] \]
修正阿尔法均值滤波:
\[ \large \hat{f}(x,y)=\frac{1}{mn-d}\sum_{(r,c)\in S_{xy}}g_R(r,c) \]
自适应滤波器:
自适应局部降噪:
\[ \Large \hat{f}(x,y)=g(x,y)-\frac{\sigma_\eta^2}{\sigma_{S_{xy}}^2}[g(x,y)-\bar{z_{S_{xy}}}] \]
自适应均值滤波:
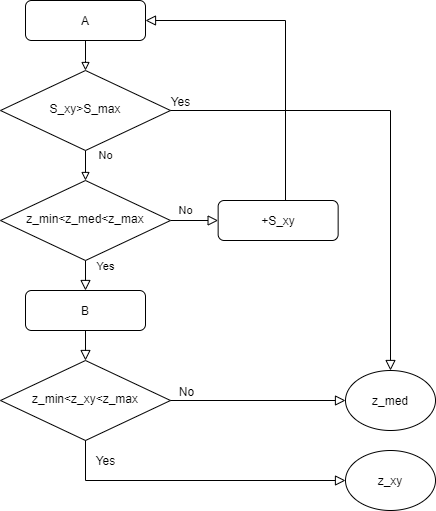
优先保留当前点的值,并且采用更小的窗
运动模糊退化:
$$ \[\begin{gather} g(x,y)=\int^T_0f\left[x-x_0(t),y-y_0(t)\right]\text{d}t\\ G(u,v)=\int^T_0F(u,v)e^{-j2\pi x_0(t)}\text{d}t=F(u,v)\int^T_0e^{-j2\pi [ux_0(t)+vy_0(t)]}\text{d}t\\ H(u,v)=\int^T_0e^{-j2\pi [ux_0(t)+vy_0(t)]}\text{d}t\\ \end{gather}\] $$
令\(x_0(t)=at/T\), \(y_0(t)=bt/T\)
\[ \Large H(u,v)=\frac{T}{\pi(ua+vb)}\sin\left[\pi(ua+vb)\right]e^{-j\pi(ua+vb)} \]
维纳(最小均方差误差)滤波:
对于噪声信号:
\[ x=s+v \]
设计一个滤波器使得y接近原始信号, 即均方误差最小
\[ E\left\{e^2\right\}=E\left\{(s-x\ast h)^2\right\}=\text{min} \]
离散域对h求导:
\[ \begin{align} \frac{\partial\{e^2\}}{\partial h}&=2E\left\{\left[\sum_mh(m)x(n-m)-s(n)\right]\sum_jx(n-j)\right\}\\ &=2E\left\{\sum_mh(m)\sum_jx(n-j)x(n-m)-\sum_js(n)x(n-j)\right\}\\ &=2\sum_mh(m)E\left\{\sum_jx(n-j)x(n-m)\right\}-2E\left\{\sum_js(n)x(n-j)\right\}\\ &=2\sum_mh(m)R_{xx}(j-m)-2R_{xs}(j) \end{align} \]
令导数为0, 得到维纳霍夫方程
\[ R_{xs}(j)=\sum_mh(m)R_{xx}(j-m)\qquad j\ge0 \]
数理统计中:
\[ \begin{gather} R_{xs}=R_{ss}+R_{vs}\\ R_{xx}=R_{ss}+R_{sv}+R_{vs}+R_{vv} \end{gather} \]
s和v互相独立:
\[ \left\{ \begin{matrix} R_{xs}=R_{ss} \\ R_{xx}=R_{ss}+R_{vv} \end{matrix} \right. \]
维纳霍夫方程z变换:
\[ H(z)=\frac{P_{xs}(z)}{P_{xx}(z)}=\frac{P_{ss}(z)}{P_{ss}(z)+P_{vv}(z)} \]
对于FIR系统:
\[ R_{xs}(j)=\sum_{m=0}^{N-1}h(m)R_{xx}(j-m)=\sum_{m=0}^{N-1}h(m)R_{xx}(m-j) \]
获得N个线性方程组:
\[ \begin{align} R_{xs}(0)&=\sum_{m=0}^{N-1}h(m)R_{xx}(m-0)\\ R_{xs}(1)&=\sum_{m=0}^{N-1}h(m)R_{xx}(m-1)\\ ...\\ R_{xs}(N-1)&=\sum_{m=0}^{N-1}h(m)R_{xx}(m-N+1)\\ \end{align} \]
写成矩阵:
\[ \large \begin{bmatrix} R_{xx}(0) & R_{xx}(1) & \cdots & R_{xx}(N-1) \\ R_{xx}(1) & R_{xx}(0) & \cdots & R_{xx}(N-2) \\ \vdots & \vdots & \ddots & \vdots \\ R_{xx}(N-1) & R_{xx}(N-2) & \cdots & R_{xx}(0) \end{bmatrix} \begin{bmatrix} h(0)\\ h(1)\\ \vdots\\ h(N-1) \end{bmatrix} = \begin{bmatrix} R_{xs}(0)\\ R_{xs}(1)\\ \vdots\\ R_{xs}(N-1)\\ \end{bmatrix} \]
简写成:
\[ \mathbb{R}_{xx}\mathcal{H}=\mathbb{R}_{xs} \]
对于非因果系统:
\[ R_{xs}(j)=\sum_{m=-\infty}^{+\infty}h(m)R_{xx}(j-m) \]
变换到\(\mathbf{Z}\)域:
\[ H(z)=\frac{P_{xs}(z)}{P_{xx}(z)} \]
得到:
\[ h(n)=\frac{1}{2\pi j}\oint H(z)z^{n-1}\text{d}z \]
要得到期望信号才能求解方程, 对于图像来说, 选取参考意义较大的一部分即可
6 彩色图像处理
光的三原色: 红(575nm), 绿(535nm), 蓝(445nm)
CRT显示器: 电子敏感荧光粉
LCD: 偏振光阻止或让光通过
CIE色度图:
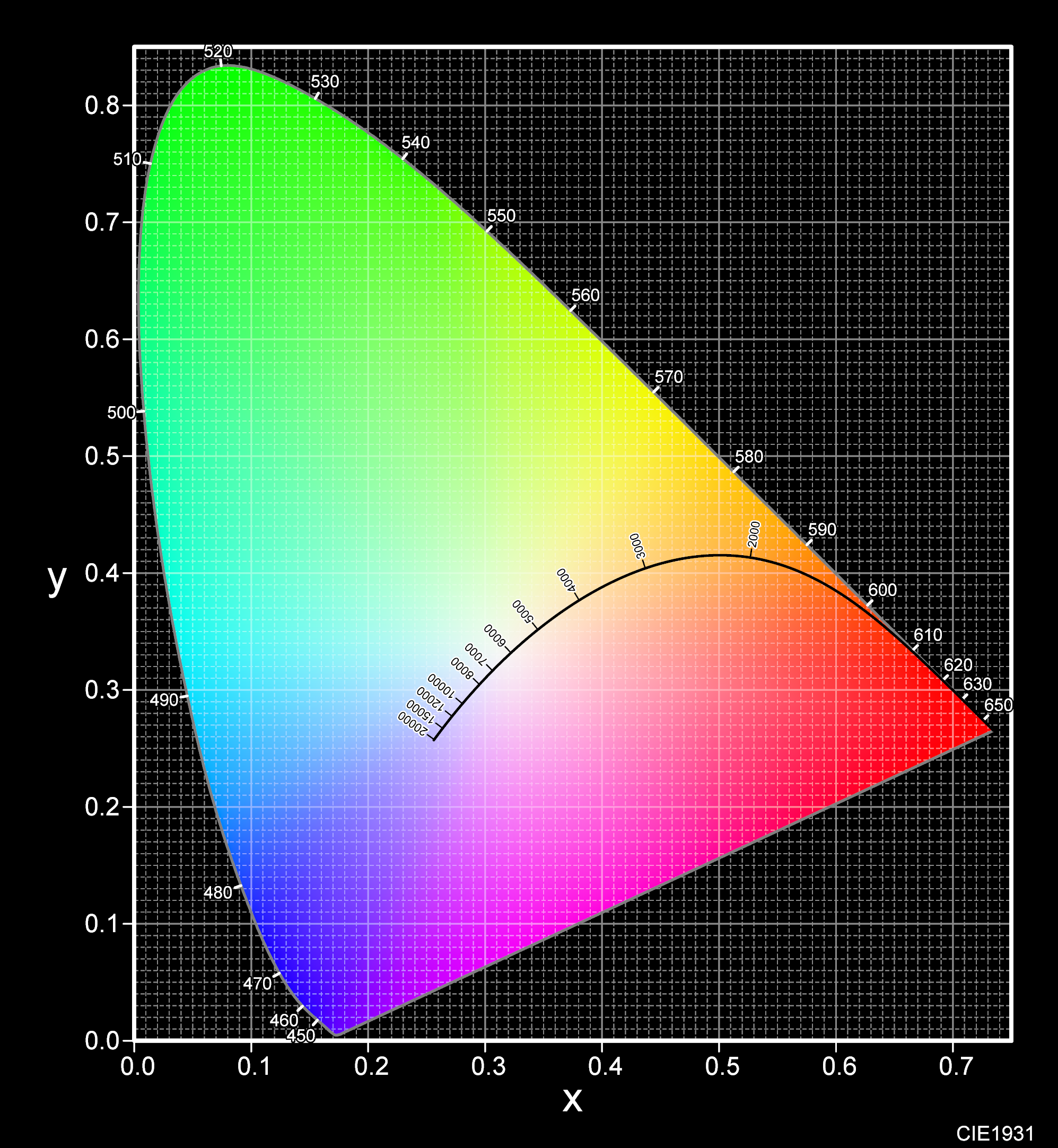
红色, 绿色和蓝色能量用X,Y,Z表示, 三色系数为
\[ \begin{gather} x=\frac{X}{X+Y+Z}\\ y=\frac{Y}{X+Y+Z}\\ z=\frac{Z}{X+Y+Z}\\ z=1-x-y \end{gather} \]
彩色模型的x轴代表x, y轴代表y, 所以在x,y=1/3的地方为白色, 最外圈代表不同波长的光, 从白光到边界上的直线定义该光谱下的所有色度
彩色模型:
RGB, 彩色摄像机
CMY(青色,深红色,黄色), CMYK(青色, 深红色, 黄色, 黑色), 彩色打印机
\[ \begin{gather} CMY=1-RGB\\ CMY\Rightarrow CMYK \left\{\begin{matrix} K=\min(C,M,Y)\\ C=(C-K)/(1-K)\\ M=(M-K)/(1-K)\\ Y=(Y-K)/(1-K) \end{matrix}\right.\\ CMYK\Rightarrow CMY \left\{\begin{matrix} C=C(1-K)/+K\\ M=M(1-K)/+K\\ Y=Y(1-K)/+K \end{matrix}\right. \end{gather} \]
- HSI(色调, 饱和度, 亮度), 解释颜色, 解除颜色信息和灰度级的关系
RGB=>HSI
\[ \begin{gather} H=\left\{\begin{matrix} \theta, & B\le G\\ 360-\theta, & B>G \end{matrix}\right.\\ \theta=\arccos\left\{\frac{1/2\left[(R-G)+(R-B)\right]}{\left[(R-G)^2+(R-B)(G-B)\right]^{1/2}}\right\}\\ S=1-\frac{3}{R+G+B}[\min(R,G,B)]\\ I=\frac{1}{3}(R+G+B) \end{gather} \]
HSI=>RGB
\[ \begin{gather} H'=\left\{\begin{matrix} H, & 0°\le H<120°\\ H-120, & 120°\le H<240°\\ H-240, & 240°\le H<360° \end{matrix}\right.\\ I(1-S)=\left\{\begin{matrix} B, & 0°\le H<120°\\ R, & 120°\le H<240°\\ G, & 240°\le H<360° \end{matrix}\right.\\ I\left[1+\frac{S\cos H'}{\cos(60°-H')}\right]=\left\{\begin{matrix} R, & 0°\le H<120°\\ G, & 120°\le H<240°\\ B, & 240°\le H<360° \end{matrix}\right.\\ 3I-(G+B)=\left\{\begin{matrix} G, & 0°\le H<120°\\ B, & 120°\le H<240°\\ R, & 240°\le H<360° \end{matrix}\right.\\ \end{gather} \]
假彩色图: ColorMap
7 小波变换和其他图像变换
对于向量集\(\pmb{w}\)
\[ \langle\pmb{w}_k,\pmb{w}_l\rangle=0,\qquad k\ne l \]
此时\(\pmb{w}\)为正交基
对于另一个对偶向量集\(\pmb{\tilde{w}}\), 有
\[ \langle\pmb{\tilde{w}}_k,\pmb{w}_l\rangle=0,\qquad k\ne l \]
此时他们为双规范正交基
双规范正交, 对于两个
对于离散的傅里叶变换:
\[ \begin{gather} T(u)=\sum_{x=0}^{N-1}f(x)r(x,u)\\ f(x)=\sum_{u=0}^{N-1}T(u)s(x,u) \end{gather} \]
\(r(x,u)\)为正变换核, \(s(x,u)\)为反变换核
用内积表示为:
\[ T(u)=\langle s(x,u),f(x)\rangle \]
对于变换矩阵(实数基):
\[ \pmb{A}\pmb{A}^T=\pmb{I} \]
二维变换:
\[ \large \begin{gather} T(u,v)=\sum_{x=0}^{N-1}\sum_{y=0}^{N-1}f(x,y)r(x,y,u,v)\\ f(x,y)=\sum_{u=0}^{N-1}\sum_{v=0}^{N-1}T(u,v)s(x,y,u,v)\\ r(x,y,u,v)=r_1(x,u)r_2(y,v)\\ \text{xy对称}\qquad r(x,y,u,v)=r_1(x,u)r_1(y,v) \end{gather} \]
则:
\[ \begin{gather} \pmb{T}=\pmb{A}\pmb{F}\pmb{A}^T\\ \pmb{F}=\pmb{A}^T\pmb{T}\pmb{A} \end{gather} \]
把二维变换分解成两个一维变换
对于矩形阵列, 变为:
\[ \begin{gather} \pmb{T}=\pmb{A}_M\pmb{F}\pmb{A}_N^T\\ \pmb{F}=\pmb{A}_M^T\pmb{T}\pmb{A}_N\\ \end{gather} \]
\(\pmb{F},\pmb{A}_M,\pmb{A}_N\)分别为\(M\times N,M\times M,N\times N\)
对于复数基:
\[ \begin{gather} \pmb{T}=\pmb{A}\pmb{F}\pmb{A}^T\\ \pmb{F}=\pmb{A}^{*T}\pmb{T}\pmb{A}^*\\ \pmb{A}^{*T}\pmb{A}=\pmb{A}\pmb{A}^{*T}=\pmb{A}^*\pmb{A}^T=\pmb{A}^T\pmb{A}^* \end{gather} \]
常见的小波变换有: DHT(离散哈特利), DCT(离散余弦), DST(离散正弦), WHT(沃尔什-哈达玛基), SLT(斜坡基), HAAR(哈尔基), DB4(Daubechies基), BIOR3.1(双正交B样条基)
海森堡不等式:
\[ \sigma^2_t\sigma^2_f\ge\frac{1}{16\pi^2} \]
对于矩形的变换对象:
\[ \begin{gather} f(x,y)=\pmb{F}=\sum_{u=0}^{N-1}\sum_{v=0}^{N-1}T(u,v)S_{u,v} \end{gather} \]
其中\(S_{u,v}\)为
\[ \large S_{u,v}=\begin{bmatrix} s(0,0,u,v)&s(0,1,u,v)&\cdots&s(0,N,u,v)\\ s(1,0,u,v)&s(1,1,u,v)&\cdots&s(1,N,u,v)\\ \vdots&\vdots&\ddots&\vdots\\ s(N,0,u,v)&s(N,1,u,v)&\cdots&s(N,N,u,v) \end{bmatrix} \]
可以看作\(F\)由\(N\times N\)个\(N^2\)的矩阵线性组合而成, 如果u,v可分离
\[ S_{u,v}=s_us_v \]
那么\(F\)为图像, \(S_{u,v}\)为基图像
离散哈特利变换(DHT):
\[ s(x,y,u,v)=\left[\frac{1}{\sqrt{N}}cas\left(\frac{2\pi ux}{N}\right)\right] \left[\frac{1}{\sqrt{N}}cas\left(\frac{2\pi vy}{N}\right)\right] \]
其中\(\text{cas}(\theta)=\cos(\theta)+\sin(\theta)\)
离散余弦变换(DCT):
\[ s(x,y,u,v)=\cos\left(\frac{(2x+1)u\pi}{2N}\right)\cos\left(\frac{(2y+1)v\pi}{2N}\right) \]
离散正弦变换(DST):
\[ s(x,y,u,v)=\frac{2}{N+1}\sin\left(\frac{(x+1)(u+1)\pi}{N+1}\right) \sin\left(\frac{(y+1)(v+1)\pi}{N+1}\right) \]
沃尔什-哈达玛变换(WHT):
\[ \LARGE s(x,y,u,v)=\frac{1}{N}(-1)^{\sum_{i=0}^{n-1}\left[b_i(x)p_i(u)+b_i(y)p_i(v)\right]} \]
其中\(b_z(k)\)表示z的二进制的第k位,
即(z & (0x1 << k)) >> k
斜变换(SLT)
递归生成
哈尔变换(HAAR):
哈尔函数:
对于任意一个\(x\in[0,1)\)
\[ \large \begin{gather} u=2^p+q\qquad u>0\\ q=2^p-u\\ h_u(x)=\left\{ \begin{matrix} 1,&u=0,0\le x<1\\ 2^{p/2},&u>0,q/2^p\le x<(q+0.5)/2^p\\ -2^{p/2},&u<0,(q+0.5)/2^p\le x<(q+1)/2^p\\ 0,&other \end{matrix} \right. \end{gather} \]
\[ s(x,u)=\frac{1}{\sqrt{N}}h_u(x/N), \qquad x=0,1,\cdots,N-1 \]
变换矩阵为:
\[ \large H_N=\begin{bmatrix} h_0(0/N)&h_0(1/N)&\cdots&h_0(N-1/N)\\ h_1(0/N)&h_1(1/N)&\cdots&h_1(N-1/N)\\ \vdots&\vdots&\ddots&\vdots\\ h_{N-1}(0/N)&h_{N-1}(1/N)&\cdots&h_{N-1}(N-1/N)\\ \end{bmatrix} \]
小波变换:
尺度函数:
\[ \begin{gather} \{\varphi_{j,k}|j,k\in Z\}\\ \varphi_{j,k}(x)=2^{j/2}\varphi(2^jx-k) \end{gather} \]
\(k\)决定x轴位置,j决定尺度形状, \(V_{j_0}\)的基为\(j=j_0,k=\cdots,-1,0,1,2,\cdots\)
对于哈尔函数
\[ \varphi(x)=\left\{ \begin{matrix} 1,&0\le x<1\\ 0,&other \end{matrix}\right. \]
\(V_1\)基为\(V_0\)基的线性组合
\[ \varphi_{0,k}=\frac{1}{\sqrt{2}}\varphi_{1,2k}+\frac{1}{\sqrt{2}}\varphi_{1,2k+1} \]
多分辨率分析的要求:
- 尺度函数相对于其整数平移是正交的
- 尺度函数以低尺度张成的函数空间嵌套在高尺度张成的函数空间中, 即
\[ V_{-\infty}\subset\cdots\subset V_{-1}\subset V_0\subset V_1\subset V_2\subset\cdots\subset V_{\infty} \]
- 在每个尺度上唯一可表示的函数是\(f(x)=0\)
- 所有可度量的, 平方可积的函数都可表示为尺度函数在\(j\rightarrow\infty\)时的线性组合, 即
\[ V_{\infty}=L^2(R) \]
\(\varphi(x)\)可以表示为自身2倍分辨率的线性组合, 细化膨胀方程
\[ \varphi(x)=\sum_{k\in Z}h_{\varphi}(k)\sqrt{2}\varphi(2x-k) \]
对于规范正交尺度函数, (内积):
\[ h_{\varphi}(k)=\left\langle\varphi(x),\sqrt{2}\varphi(2x-k)\right\rangle \]
小波函数:
递归式:
\[ \psi(x)=\sum_k\sqrt{2}\varphi(2x-k) \]
其中\(h_\psi(k)\)系数称为(小波函数系数)
小波级数展开:
\[ f(x)=\sum_kc_{j_0}(k)\varphi_{j_0,k}(x)+\sum_{j=j_0}^{\infty}\sum_kd_j(k)\psi_{j,k}(x) \]
式中, \(c_{j_0}\)和\(d_j,j\ge j_0\)分别称为近似系数和细节系数, 若尺度和小波函数规范正交, 则有:
\[ \begin{gather} c_{j_0}=\left\langle f(x),\varphi_{j_0,k}(x)\right\rangle \\ d_j=\left\langle f(x),\psi_{j,k}(x)\right\rangle \end{gather} \]
利用了正交性
对于\(y=x^2\)的哈尔小波展开
\[ y=\left\{ \begin{matrix} x^2,&0\le x\le 1\\ 0,&other \end{matrix} \right. \]
采用哈尔小波计算
\[ \begin{align} c_0(0)&=\int_0^1x^2\varphi_{0,0}(x)\text{d}x=\int_0^1x^2\text{d}x=\left.\frac{x^2}{3}\right|_0^1=\frac{1}{3}\\ d_0(0)&=\int_0^1x^2\psi_{0,0}(x)\text{d}x=\int_0^{0.5}x^2\text{d}x-\int_{0.5}^1x^2\text{d}x=-\frac{1}{4}\\ d_1(0)&=\int_0^1x^2\psi_{1,0}(x)\text{d}x=\int_0^{0.25}x^2\sqrt{2}\text{d}x-\int_{0.25}^{0.5}x^2\sqrt{2}\text{d}x=-\frac{1}{4}=-\frac{\sqrt{2}}{32}\\ d_1(1)&=\int_0^1x^2\psi_{1,1}(x)\text{d}x=\int_{0.5}^{0.75}x^2\sqrt{2}\text{d}x-\int_{0.75}^{1}x^2\sqrt{2}\text{d}x=-\frac{1}{4}=-\frac{3\sqrt{2}}{32} \end{align} \]
带入展开函数可得到:
\[ y= \sideset{}{}{\underbrace{ \sideset{}{}{\underbrace{ \sideset{}{}{\underbrace{\frac{1}{3}\varphi_{0,0}(x)}}_{V_0} + \sideset{}{}{\underbrace{\left[-\frac{1}{4}\psi_{0,0}(x)\right]}}_{W_0} }}_{V_1=V_0\oplus W_0} + \sideset{}{}{\underbrace{\left[-\frac{\sqrt{2}}{32}\psi_{1,0}(x)-\frac{3\sqrt{2}}{32}\psi_{1,1}(x)\right]}}_{W_1} }}_{V_2=V_1\oplus W_1=V_0\oplus W_0\oplus W_1} + \cdots \]
一维离散小波变换
\[ f(x)=\frac{1}{\sqrt{N}}\left[T_{\varphi}(0,0)\varphi(x)+\sum_{j=0}^{J-1}\sum_{k=0}^{2^j-1}T_{\psi}(j,k)\psi_{j,k}(x)\right] \]
其中
\[ T_\varphi(0,0)=\left\langle f(x),\varphi_{0,0}(x)\right\rangle=\left\langle f(x),\varphi(x)\right\rangle=\frac{1}{\sqrt{N}}\sum_{x=0}^{N-1}f(x)\varphi^*(x) \]
\[ T_\psi(j,k)=\left\langle f(x),\psi_{j,k}(x)\right\rangle=\frac{1}{\sqrt{N}}\sum_{x=0}^{N-1}f(x)\psi^*_{j,k}(x) \]
\(*\)代表共轭, 第一个系数代表近似系数, 第二个代表细节系数, 如果尺度函数和小波函数的值是实数, 那么可以消除共轭, 如果基是双正交的, 则上两式中的\(\varphi\)和\(\psi\)必须由他们的对偶\(\tilde{\varphi}\)和\(\tilde{\psi}\)代替
\(V_0\)和\(W_0\)的基可以是双正交, 也可以是\(V_0\)的基为\(W_0\)的低尺度变换基
快速小波变换:
通过\(\varphi\)和\(\psi\)的迭代可以
展开系数:
\[ \begin{gather} c_j(k)=\sum_nh_{\varphi}(n-2k)c_{j+1}(n)\\ d_j(k)=\sum_nh_{\psi}(n-2k)c_{j+1}(n)\\ \end{gather} \]
得到的变换结果:
\[ \begin{gather} T_{\varphi}(j,k)=\sum_nh_{\varphi}(n-2k)T_{\varphi}(j+1,n)\\ T_{\psi}(j,k)=\sum_nh_{\psi}(n-2k)T_{\psi}(j+1,n) \end{gather} \]
对于离散的小波变换:
\[ \begin{gather} T_{\varphi}(j,k)=T_{\varphi}(j+1,n)\bigstar h_{\varphi}(-n)\\ T_{\psi}(j,k)=T_{\psi}(j+1,n)\bigstar h_{\psi}(-n) \end{gather} \]
分析滤波器组:
\[ T_{\varphi}(j+1,k)\rightarrow\left\{ \begin{matrix} \bigstar h_{\psi}(-n)&\rightarrow&2\downarrow&\rightarrow&T_{\psi}(j,k)\\ \bigstar h_{\varphi}(-n)&\rightarrow&2\downarrow&\rightarrow&T_{\varphi}(j,k) \end{matrix} \right. \]
对于多尺度的, 接着对\(T_{\varphi}(j,k)\)进行分析
二维小波变换:
二维需要1个二维尺度函数\(\varphi(x,y)\)和3个二维小波函数\(\psi^H(x,y),\psi^V(x,y),\psi^D(x,y)\)分别代表垂直水平对角, 每个二维小波都是两个一维函数的积排除\(\varphi(x)\psi(x)\), 剩下可分离的尺度函数:
\[ \varphi(x,y)=\varphi(x)\varphi(y) \]
和可分离的”方向敏感小波”:
\[ \begin{gather} \psi^H(x,y)=\psi(x)\varphi(y)\\ \psi^V(x,y)=\varphi(x)\psi(y)\\ \psi^D(x,y)=\psi(x)\psi(y) \end{gather} \]
\[ T_{\varphi}(j+1,k)\rightarrow\left\{ \begin{matrix} \bigstar h_{\psi}(-n)\rightarrow2\downarrow\rightarrow \left\{ \begin{matrix} \bigstar h_{\psi}(-m)\rightarrow2\downarrow\rightarrow T_{\psi}^D(j,k)\\ \bigstar h_{\varphi}(-m)\rightarrow2\downarrow\rightarrow T_{\psi}^V(j,k) \end{matrix} \right. \\ \bigstar h_{\varphi}(-n)\rightarrow2\downarrow\rightarrow \left\{ \begin{matrix} \bigstar h_{\psi}(-m)\rightarrow2\downarrow\rightarrow T_{\psi}^H(j,k)\\ \bigstar h_{\varphi}(-m)\rightarrow2\downarrow\rightarrow T_{\varphi}(j,k) \end{matrix} \right. \end{matrix} \right. \]
排布:
\[ \begin{matrix} T_{\varphi}&T_{\psi}^H\\ T_{\psi}^V&T_{\psi}^D\\ \end{matrix} \]
8 图像压缩和水印
9 形态学图像处理
反射: 结构元旋转180°
腐蚀:
\[ A\ominus B=\{z|(B)_z\subseteq A\} \]
\(A\)为前景像素的集合, \(B\)为结构元, z是前景像素值(结构元中的点)
等效于
\[ I\circleddash B=\{z|(B)_z\subseteq A,A\subseteq I\}\cup\{A^c|A^c\subseteq I\} \]
\[ A\ominus B=\left\{z|(B)_z\cap A^c=\varnothing\right\} \]
\(A^c\)为补集
腐蚀可以增强图像细的目标, 删除前景图像中小于结构元的部分
膨胀:
\[ A\oplus B=\{z|(\hat{B})_z\cap A\neq \varnothing\} \]
\(\hat{B}\)为\(B\)的反射, 所有和\(A\)相交的位移点集合
等效于
\[ A\oplus B=\{z|[(\hat{B})_z\cap A]\subseteq A\} \]
膨胀运算类似于二维图像卷积, \(B\)为卷积核
膨胀可以增长粗化图像中的目标, 用于修复断裂字符等
对偶性:
\[ (A\ominus B)^c=A^c\oplus B^c \]
\[ (A\oplus B)^c=A^c\ominus B^c \]
开运算:
\[ A\circ B=(A\ominus B)\oplus B=\cup\{(B)_z|(B)_z\subseteq A\} \]
闭运算:
\[ A\bullet B=(A\oplus B)\ominus B=[\cup(B)_z|(B)_z\cap A=\varnothing]^c \]
开运算闭运算对偶:
\[ (A\circ B)^c=(A^c\bullet B^c) \]
\[ (A\bullet B)^c=(A^c\circ B^c) \]
开运算性质:
- \(A\circ B\subseteq A\)
- 若\(C\subseteq D\), \(C\circ B\subseteq D\circ B\)
- \((A\circ B)\circ B=A\circ B\)
闭运算性质:
- \(A\bullet B\subseteq A\)
- 若\(C\subseteq D\), \(C\bullet B\subseteq D\bullet B\)
- \((A\bullet B)\bullet B=A\bullet B\)
击中-击不中变换(HMT):
两个结构元, 前景中检测形状\(B_1\), 背景中检测形状\(B_2\):
\[ I\circledast B_{1,2}=\{z|(B_1)_z\subseteq A, (B_2)_z\subseteq A^c\}=(A\ominus B_1)\cap(A^c\ominus B_2) \]
其中\(B_1\cap B_2=\varnothing\)
目的是为了检测在\(A\)中和\(B_1\)一模一样的元, \(B_2\)为\(B_1\)膨胀1后减去\(B_1\)的元, 最终的结果是匹配到的结构元的选定的代表结构元的点, 最终结果是位置点
形态学算法
边界提取:
\[ \beta(A)=A-(A\ominus B) \]
孔洞填充:
\[ X_k=(X_{k-1}\oplus B)\cap I^c,\qquad k=1,2,3,\cdots \]
其中\(X_0\)为孔洞中的一个点, 需要提前给出
连通量提取:
\[ X_k=(X_{k-1}\oplus B)\cap I,\qquad k=1,2,3,\cdots \]
其中\(X_0\)为前景上面的一个点, 根据这个点在前景上扩展直到不在增加, 对于4连通域要用4连通域的结构元, 对于8连通域要用8连通域的结构元
凸壳:
点集\(S\)是凸的定义是: 连接\(S\)内任意两点的直线段完全在\(S\)内, 凸壳\(H\)是包含\(S\)的最小凸集
\[ X_k^i=(X_{k-1}^i\circledast B^i)\cup X_{k-1}^i,\qquad i=\{1,2,3,4\},k=1,2,3,\cdots \]
结构元如图:
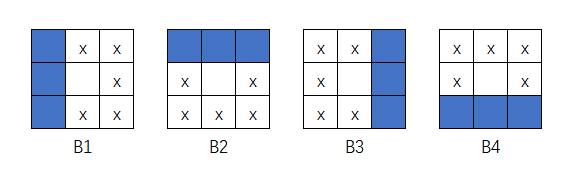
图中的x代表不管有没有匹配到x都可以, 但是没有x的代表必须没有
原理:
比如\(B_1\), 在原图上检测到三个像素一列, 就会在三个像素中间的右侧填充前景色迭代下去
四个方向最终运算的结果会是一个四边形, 但是根据原始图像的四个方向的最边缘像素可以截取掉多余的部分
细化:
\[ A\otimes B=A-(A\circledast B)=A\cap (A\circledast B)^c \]
而\(B\)由一系列的结构元组成
\[ A\otimes \{B\}=((\cdots((A\otimes B^1)\otimes B^2))\otimes B^n) \]
\(A\)从被\(B^1\)一直到\(B^n\)细化, 然后再重复, 直到所有的结构元都不能细化为止
结构元如图:
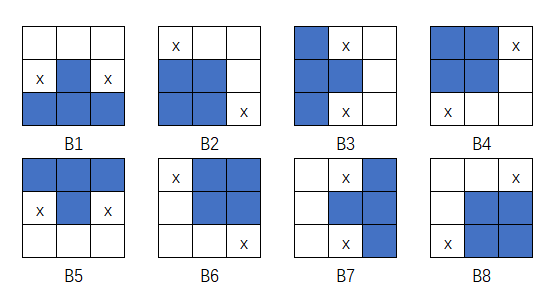
对于上下左右来说, 细化是凸壳的类似逆运算, 会舍弃匹配到的一列(横,竖,斜), 对于数字图像来说
骨架:
集合\(A\)的骨架\(S(A)\)
若\(z\)是\(S(A)\)的一点, \((D)_z\)是以\(z\)为圆心的最大圆盘, 则不存在包含\((D)_z\)且位于\(A\)内的更大圆盘(不必以\(z\)为中心). 满足这些条件的圆盘\((D)_z\)称为最大圆盘
若\((D)_z\)是一个最大圆盘, 则它在两个或多个不同位置与\(A\)的边界接触
\(A\)的骨架可以用开运算表示:
\[ S(A)=\bigcup_{k=0}^KS_k(A) \]
\[ S_k(A)=(A\ominus kB)-(A\ominus kB)\circ B \]
每次被开运算去掉的部分的集合
裁剪:
消除噪声引起骨架的寄生部分
形态学重建:
根据标记点, 在原图前景处不断扩散直到不能扩散, 用处比如在带字的图像上取单个字符
测地膨胀
\[ D_G^{(1)}(F)=(F\oplus B)\cap G \]
\(F\)为标记图像, \(G\)为模板图像, 根据模板图像的以标记点为中心膨胀
对于大小为\(n\)的测地膨胀
\[ D_G^{(n)}(F)=D_G^{(1)}\left[D_G^{(n-1)}(F)\right] \]
测地腐蚀
\[ E_G^{(1)}(F)=(F\ominus B)\cup G \]
\(F\)为标记图像, \(G\)为模板图像, 根据模板图像将标记图像不断腐蚀
\[ E_G^{(n)}(F)=E_G^{(1)}\left[E_G^{(n-1)}(F)\right] \]
标记\(F\)对模板图像\(G\)的膨胀形态学重建为
\[ R_G^D(F)=D_G^k(F) \]
腐蚀形态学重建
\[ R_G^E(F)=E_G^k(F) \]
灰度形态学
灰度腐蚀
\[ [f\ominus b](x,y)=\min_{(s,t)\in b}\{f(x+s,y+t)\} \]
灰度膨胀
\[ [f\oplus b](x,y)=\max_{(s,t)\in b}\{f(x-s,y-t)\} \]
其中\((x-s,y-t)\)相当于结构元旋转了180°
灰度开运算闭运算
和二值图像相同
灰度级形态学算法
形态学平滑
使用先做开运算后做闭运算
形态学梯度
\[ g=(f\oplus b)-(f\ominus b) \]
顶帽变换和底帽变换
顶帽
\[ T_{hat}(f)=f-(f\circ b) \]
底帽
\[ B_{hat}(f)=(f\bullet b)-f \]
例子, 用顶帽变换校正阴影用于阈值分割, 基于Otsu最优阈值会因为阴影出现错误
粒度测量
纹理分割
灰度形态学重建
$$
$$